Gait Cycle Testbed for Prosthetic Knee Simulation
Gait Cycle Testbed for Prosthetic Knee Simulation
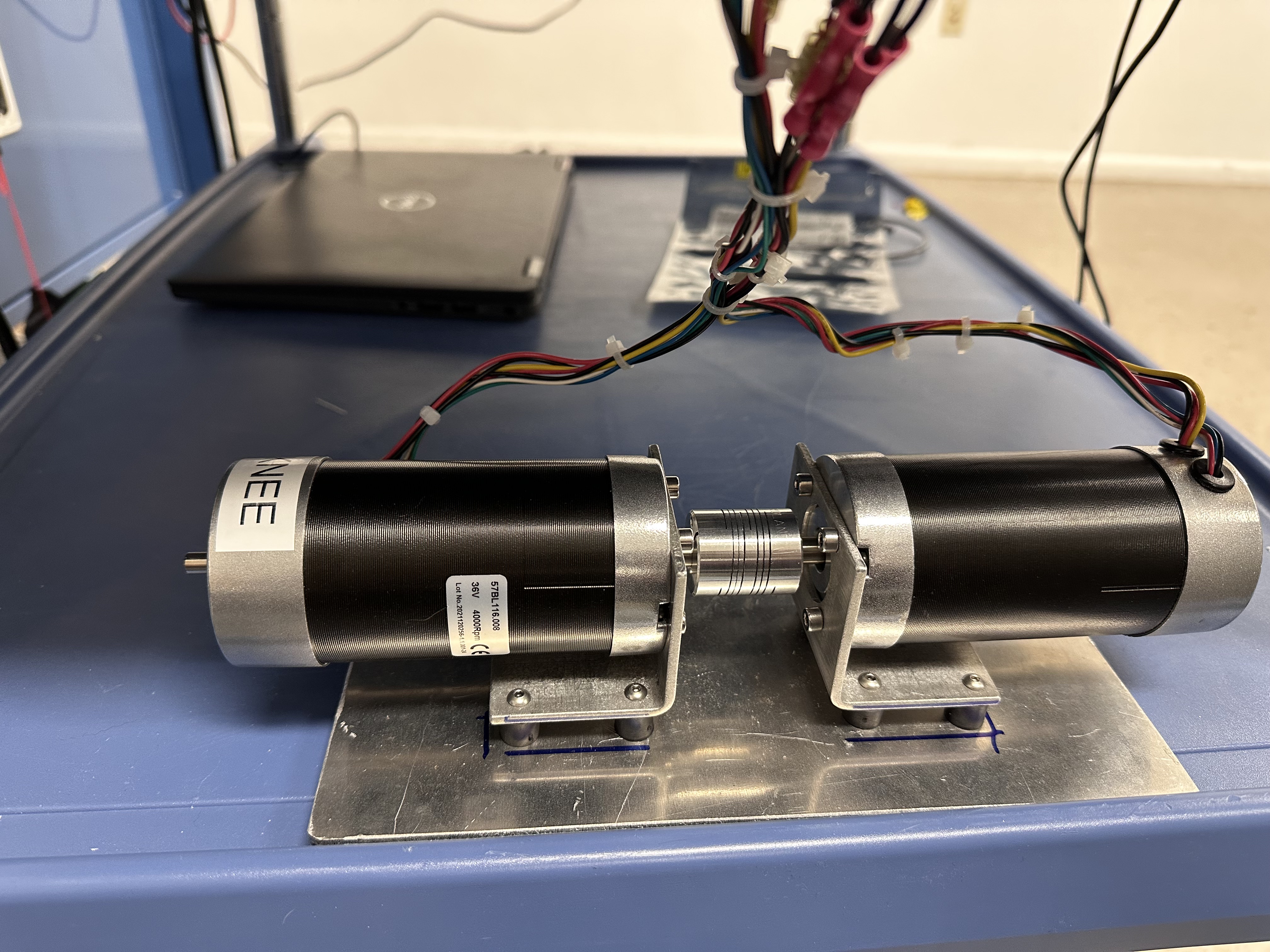
Overview Built a two-motor testbed to emulate human walking and prosthetic-knee dynamics. One motor replays prerecorded gait-cycle profiles (angle & torque), while the second motor provides adjustable resistance and regenerative braking to mimic prosthetic knee behavior.
My Role & Contributions
- Regenerative Circuit Design: Developed and prototyped a braking circuit (LTspice → breadboard) to harvest energy during knee flexion/extension phases.
- Arduino Control Firmware: Wrote synchronized control code on an Arduino Uno to command both motors from gait-cycle datasets.
- Closed-Loop Motor Control: Integrated incremental encoders and implemented PID loops to accurately reproduce gait angle and torque profiles.
- System Validation: Loaded standard gait datasets, ran end-to-end tests, and analyzed kinematic and power metrics to verify performance.
Technologies & Tools
- Embedded & Control: Arduino Uno, PID control, incremental encoders
- Power Electronics: Custom regenerative braking circuit, LTspice for simulation
- Software: C/C++ (Arduino)